※なにか気になる点がありましたらコメント欄にご記入ください。また、工作や回路を製作する場合には、細かい作業などに対して、細心の注意を払われるようお願いいたします。
- 1.はじめに
- 2.HSVについて
- 3.検証結果
- 4.明度を一定にした場合
- 5.まとめ
1.はじめに
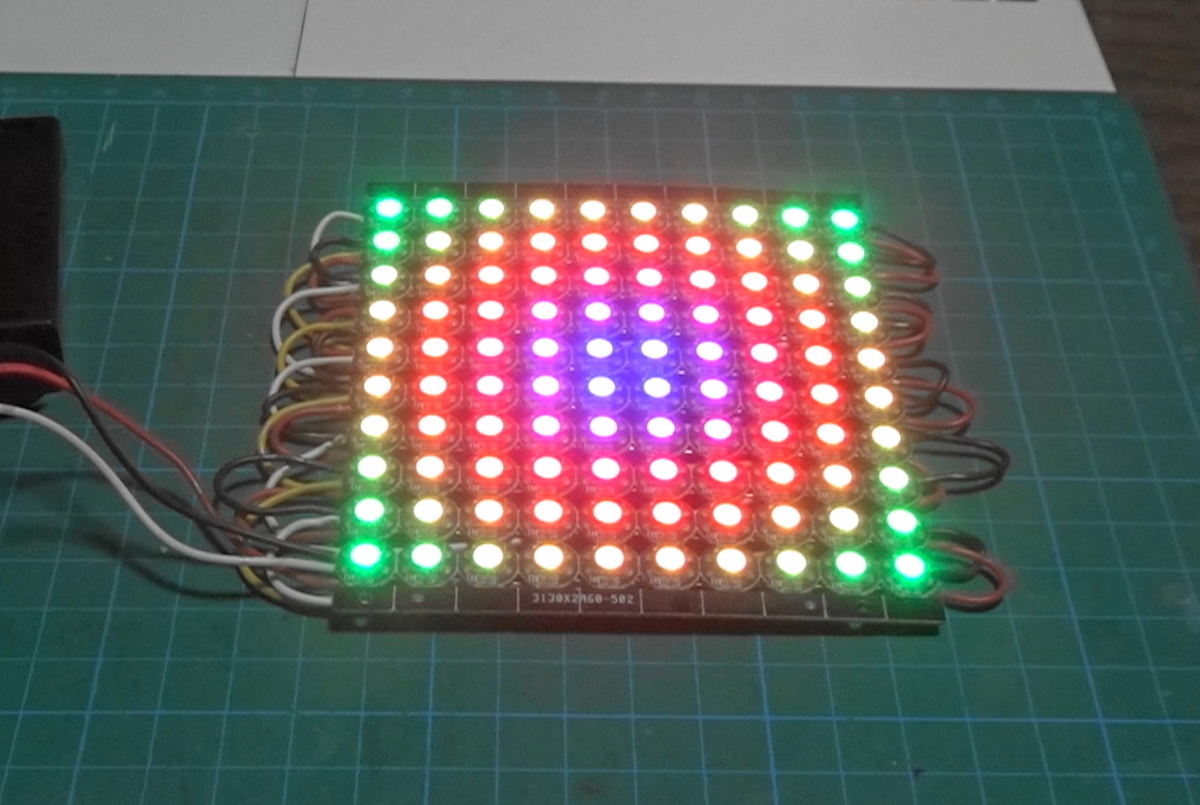
以前、筆者は以下の記事で独自のやり方で、虹色をNeopixelに描いてみました。
tanuki-bayashin.hatenablog.com
しかし、最近眼にしたYoutubeの動画を見ていたら、「DHAの電子工作教室」というチャンネルで、HSVという色の表現方法があることが紹介されていました。(以下参照)
このHSVという表現形式によると、色の別の見方が分かることを知りました。
今回は筆者が独自で作った色について、この動画の内容をもとに検証してみたので、書いていきたいと思います。