※なにか気になる点がありましたらコメント欄にご記入ください。
【目次】
- 1.はじめに
- 2.ROMのデータを生成するツールについて
- 2.1 デコーダーのROMのデータ
- 2.2 ALUのROMのデータ
- 3.アセンブラーについて
- 4.さまざまなアセンブリコード
- 4.1 流れるLED
- 4.2 カウンター
- 4.2.1 手動モードでの動き
- 4.3 ラーメンタイマー
- 4.4 フィボナッチ数列(mod16 version)
- 4.5 かけ算四四
- 4.6 1次元のライフゲーム(セルオートマトン)
- 4.7 捕食動物-被食動物のモデルの計算(近似計算)
- まとめ
1.はじめに
前々回は4bitCPUの設計に関する記事を、前回は実機を組み立て動作確認するまでの記事を投稿しました。
tanuki-bayashin.hatenablog.com
tanuki-bayashin.hatenablog.com
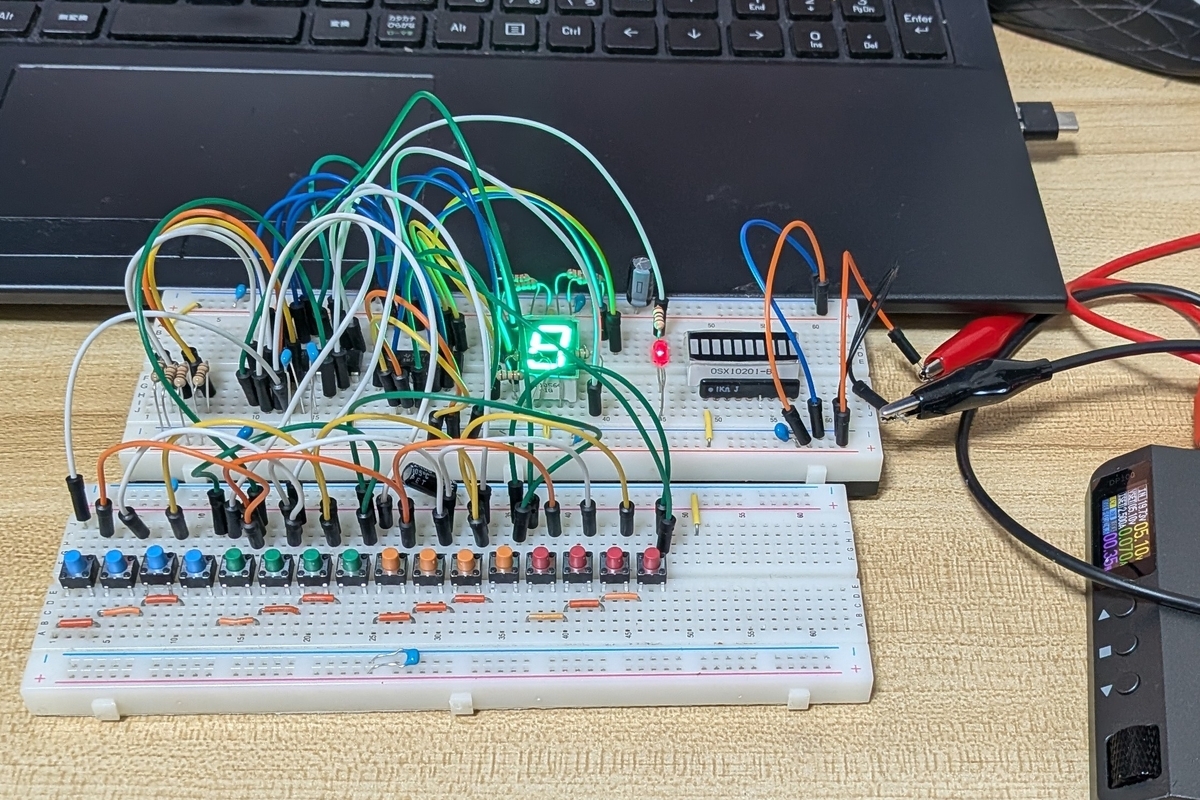
今回はこのCPUを実際に動かしている様子を残しておきたいと思います。
またこのCPUはデコーダーとALUにROMを使っていて、そのデータを作るのに使ったツールについても紹介しておきたいと思います。
(ROMを使っているので後から仕様を変更することもできます)
さらに簡単なものにはなりますが、このCPU専用のアセンブリ言語があって、それをマシン語に変換するアセンブラーも制作したのでそれについても触れておきたいと思います。

またこのCPUを作るのに関係した設計資料、ツール、制作したプログラムやマシン語を収めたリポジトリをGitHub上に公開しています。
GitHub - Myuu1967/TB-04: 4bitCPU(TB-04)に関するリポジトリです · GitHub
ぜひご活用ください。