※なにか気になる点がありましたらコメント欄にご記入ください。また、工作や回路を製作する場合には、細かい作業などに対して、細心の注意を払われるようお願いいたします。
【目次】
- 1.はじめに
- 2.ソースコード
- 3.制御している様子
1.はじめに
前回投稿した記事でMCP3208を用いて、A/D変換のチャンネルを増やすことを試みました。
tanuki-bayashin.hatenablog.com
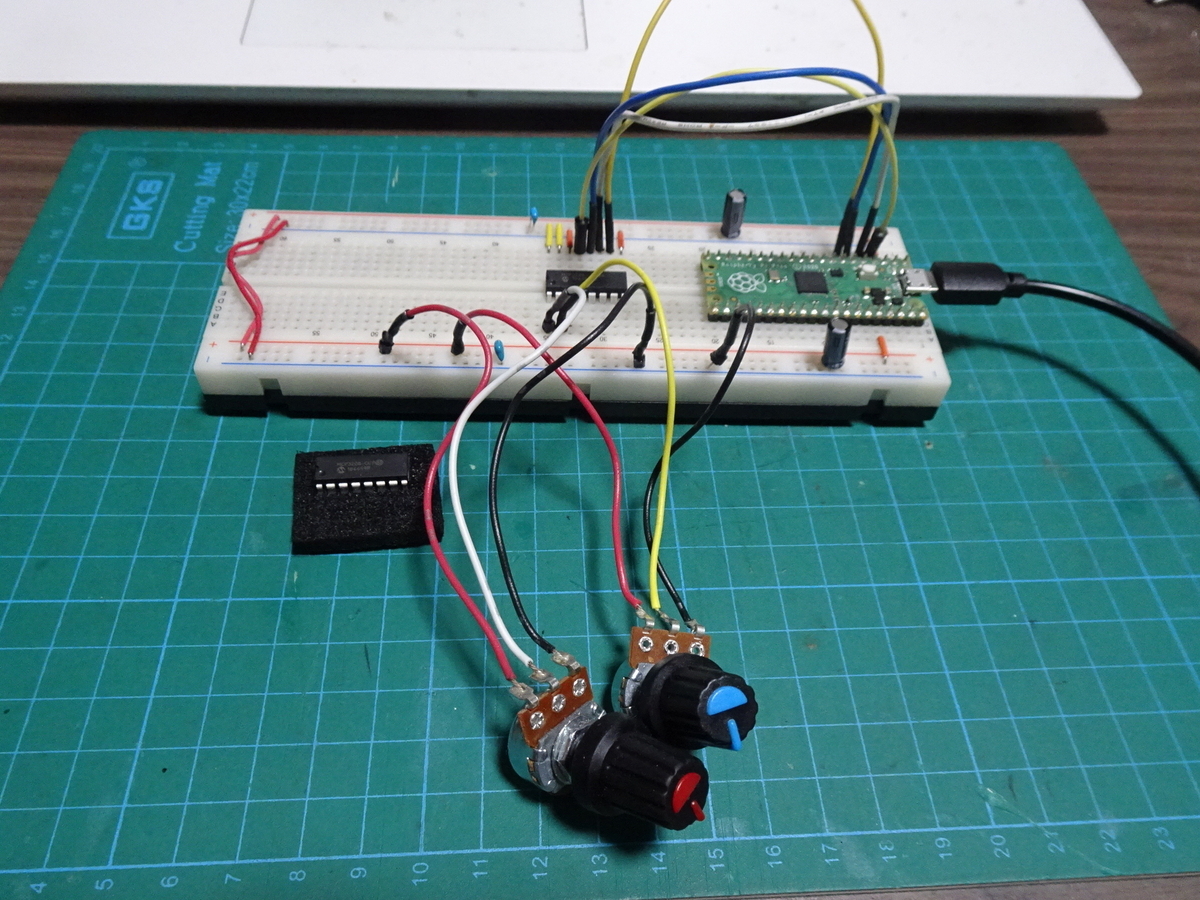
それは今回の取り組みと大きく関わっています。Raspberry Pi Pico(以下Picoと表記)では、自由に利用できるA/D変換のポートが3つまでだからです。
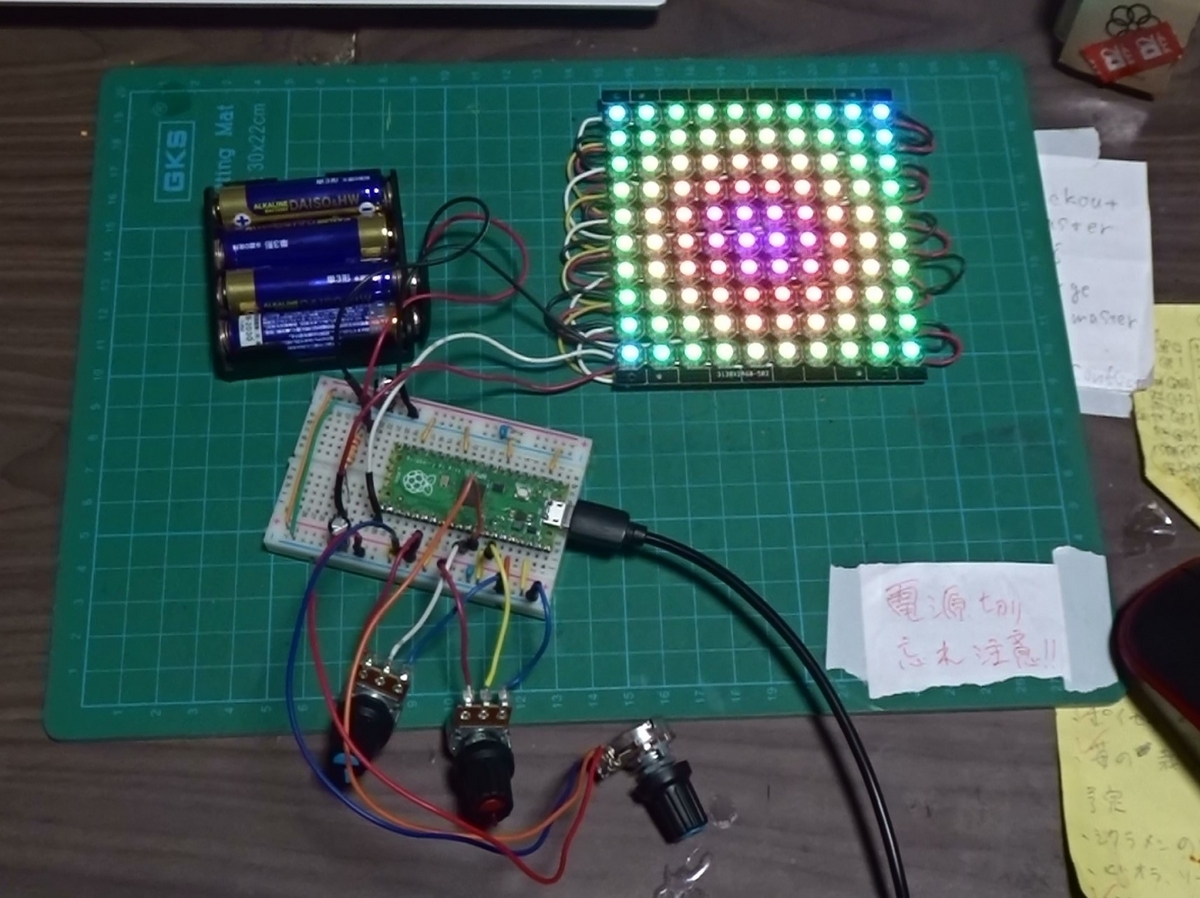
以前Neopixelに関する記事で、3つのVRでNeopixelのいろいろな要素を制御しましたが、今回はさらに2つVRを追加して新たな動きを付け加えたいと思います。
以前書いた記事:
tanuki-bayashin.hatenablog.com