※なにか気になる点がありましたらコメント欄にご記入ください。また、工作や回路を製作する場合には、細かい作業などに対して、細心の注意を払われるようお願いいたします。
目次
1.はじめに
以前書いた記事で(2022/05/19)、Raspberry Pi Pico(以下Pico と記述) を用いて、倒立振子を製作するのに欠かせない傾斜計の試作を行いました。そのときはMicro Python を使ってコードを記述しましたが、今回はC言語を用いてコードを書いています。
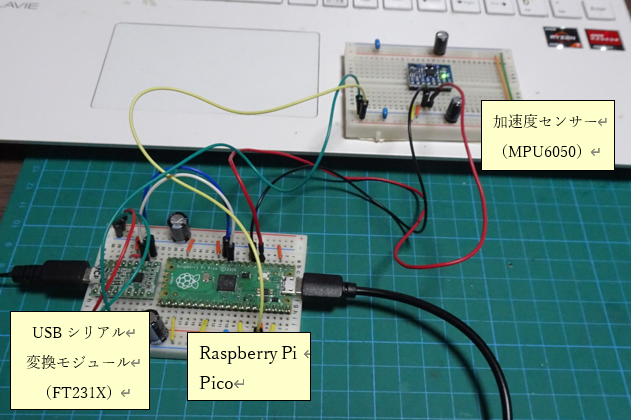
ハードの部分は、以前の記事を参考にしてください。また、加速度センサー(MPU-6050)からのデータを読み込む部分のコードは、Pico-SDK のサンプルの中に偶然入っていたので、そのまま利用しました。(ラズベリーパイ財団の著作物みたいなので、ここでは公表は控えました。悪しからず)
前回の記事では(2022/06/22)、同一環境でPico からUART により、PCに数値のデータを送信する手法を示すところまでできているので、今回の記事では、加速度センサーからデータを読み込む処理を付け加えた形となっています。
※今回は新たに、小数点以下の数値も表示できるようにした関数も用意しました。
以前書いた記事:
傾斜計の試作機の製作 - Tanuki_Bayashin’s diary
前回書いた記事:
ラズパイPico によるUART接続~Pico-SDK C/C++開発環境にて - Tanuki_Bayashin’s diary
ご参考:
pico-sdk C/C++ での開発の進め方 - Tanuki_Bayashin’s diary
主な仕様
- マイコン:ラズベリーパイPico
- センサー:3軸加速度、角速度センサ(MPU6050)
- 開発環境:Pico-SDK C/C++
出典:トランジスタ技術 2019年7月号 第1章第2節(P.39~)のあたり(再掲)
※ここでは自分なりに考えた処理を紹介していますが、後日、以下のやり方を他の方のブログにて見つけました。こちらの方がPC側に送信した後でもデータの扱いがしやすいことから、コードに書くには適していると思われます。(2022/08/11追記)
snprintf(s, sizeof(s), "%f", angle); uart_puts(UART_ID, s);
解説:1行目により、angleというfloatの変数をsという文字列に変換したのち、uart_puts()にてデータを送信しています。
2.傾斜計のソフトウェア
コードをリスト1に示します。
今回は加速度センサーからのデータはUARTによりPCに送り、Terataermにより表示しています。
加速度センサーの初期化と値を読み取る関数は、Pico-SDKのサンプル・プログラムを引用しました。(省略してありますが)
UARTに関する処理は、同様にPico-SDKのサンプル・プログラムを引用し、また独自に自作したものもあります。(1章 前回書いた記事参照)
※何の気なしにコードを載せておりますが、安全性への確固たる責任は保証できるものではありません。恥ずかしい話ですが、危険性が少しでもはらむと判断される用途には、利用されないことを強くお願い申し上げます。
リスト1 mpu6050_uart_2nd.c
/** * Copyright (c) 2020 Raspberry Pi (Trading) Ltd. * * SPDX-License-Identifier: BSD-3-Clause */ #include <stdio.h> #include <string.h> #include <math.h> #include "pico/stdlib.h" #include "hardware/uart.h" #include "pico/binary_info.h" #include "hardware/i2c.h" #define UART_ID uart1 #define BAUD_RATE 2400 #define UART_TX_PIN 8 #define UART_RX_PIN 9 #define PI 3.1415926535898 // By default these devices are on bus address 0x68 static int addr = 0x68; #ifdef i2c_default static void mpu6050_reset() { // 省略(mpu6050を初期化します) } static void mpu6050_read_raw(int16_t accel[3], int16_t gyro[3], int16_t* temp) { // 省略(mpu6050からの生データを読み取ります) } #endif void uart_integer_to_string(int16_t a) { // 数値を文字に変換する関数です if (a == 0) { uart_putc(UART_ID, '0'); } else if (a == 1) { uart_putc(UART_ID, '1'); } else if (a == 2) { uart_putc(UART_ID, '2'); } else if (a == 3) { uart_putc(UART_ID, '3'); } else if (a == 4) { uart_putc(UART_ID, '4'); } else if (a == 5) { uart_putc(UART_ID, '5'); } else if (a == 6) { uart_putc(UART_ID, '6'); } else if (a == 7) { uart_putc(UART_ID, '7'); } else if (a == 8) { uart_putc(UART_ID, '8'); } else if (a == 9) { uart_putc(UART_ID, '9'); } else { uart_putc(UART_ID, 'X'); } } void sendDataByUART(int16_t x) { // int16_t の型の変数をUARTにて送信します int16_t digit, a; if (x < 0) { x = -1 * x; uart_putc(UART_ID, '-'); } digit = floor(log10((double)x)); for (int j = digit; j > 0; j--) { a = floor(x / pow(10.0, j)); x = x - a * pow(10.0, j); uart_integer_to_string(a); } uart_integer_to_string(x); uart_puts(UART_ID, ", "); sleep_ms(50); } void sendData_double(double x) { // 倍精度実数の変数をUARTにて送信します int16_t digit, a; if (x < 0) { x = -1 * x; uart_putc(UART_ID, '-'); } digit = floor(log10(x)); // 数値が0で始まる場合の処理です if (digit < 0) { uart_puts(UART_ID, "0."); for (int i = -1; i > digit; i--) { uart_puts(UART_ID, "0"); } } // 小数第4位まで表示します for (int j = digit; j >= -4; j--) { a = floor(x / pow(10.0, j)); x = x - a * pow(10.0, j); uart_integer_to_string(a); if (j == 0) { uart_puts(UART_ID, "."); } } uart_puts(UART_ID, ", "); sleep_ms(50); } int main() { // Set up our UART with the required speed. uart_init(UART_ID, BAUD_RATE); // 省略(UARTの機能を初期化しています) #if !defined(i2c_default) || !defined(PICO_DEFAULT_I2C_SDA_PIN) || //以下省略 // 省略(mpu6050を使えるようにします) int16_t acceleration[3], gyro[3]; int16_t x; int16_t* temp; while (1) { mpu6050_read_raw(acceleration, gyro, temp); uart_puts(UART_ID, "Accel:"); for (int16_t i = 0; i < 3; i++) { x = acceleration[i]; sendDataByUART(x); } double angle; angle = atan2((double)acceleration[1], (double)acceleration[2])*180.0/PI; sendData_double(double x) uart_puts(UART_ID, "\r\n"); sleep_ms(10); } #endif return 0; }
解説
7 ~ 13行目: 必要なヘッダファイルを取り込んでいます。
15~19行目: UART(シリアル通信)に関するマクロを設定しています。
(uart1を選択,,ボーレート2400、TX=GPIO8(11番ピン)、RX=GPIO9(12番ピン))
21~22行目: 加速度センサーMPU6050のI2Cアドレスを指定しています。
24~34行目 : mpu6050に関する関数の定義です。
36~72行目 : int16_t の型を持つ数値に応じて、対応する文字をUARTにより送信しています。
74~94行目 : int16_t型の数値xをPC側に送信する関数です。(UART)
96~130行目 : 倍精度実数型の数値を送信する関数です。
132~162行目 : main() 関数です。
134~136行目 : UARTを初期化します。
138,139行目 : 加速度センサーMPU6050を動作可能としているようです。
141~143行目 : 変数の型を指定します。
145~162行目 : 無限ループの部分です。
147行目 : 加速度センサーMPU6050からのデータを読み取っています。
149~153行目 : 加速度のデータをPCに送信しています。
155~157行目 : 傾きの角度を計算し、データをPC側に送信します。
159行目 : 改行と、文字位置の復帰のエスケープ・シーケンスです。
161行目 : 10ms、待機しています。
164行目 : main( ) 関数の戻り値 0 を返しています
解説は以上です。
3.今回のコードをビルドするときに使用したCMakeLists.txt
以下の通りです。(ディレクトリ構造については1章にある「ご参考」の記事を参照してください)
リスト2 ディレクトリpico/works の中に保存してあるCMakeLists.txt
cmake_minimum_required(VERSION 3.16) # Pull in SDK (must be before project) include(pico_sdk_import.cmake) project(pico_examples C CXX ASM) set(CMAKE_C_STANDARD 11) set(CMAKE_CXX_STANDARD 17) set(PICO_EXAMPLES_PATH ${PROJECT_SOURCE_DIR}) # Initialize the SDK pico_sdk_init() include(example_auto_set_url.cmake) # Add blink example add_subdirectory(mpu6050_uart_2nd)
リスト3 pico/works/mpu6050_uart_2nd の中に保存しているCMakeLists.txt
add_executable(mpu6050_uart_2nd mpu6050_uart_2nd.c ) # Pull in our (to be renamed) simple get you started dependencies target_link_libraries(mpu6050_uart_2nd pico_stdlib hardware_i2c) # create map/bin/hex file etc. pico_add_extra_outputs(mpu6050_uart_2nd) # add url via pico_set_program_url example_auto_set_url(mpu6050_uart_2nd)
※ライブラリに関する記述(6行目)では、2章のコード内でインクルードされているヘッダファイルで、ダブルコーテーションマークで囲まれているもののうち、一番上と一番下を記述すればよいようです。